ワークが搬送されない新着!!
version : Visual Components 4.9 ワークが搬送されないときは プロセスモデリングにおいて、ワークが搬送されないときにありがちな間違った設定3パターンをご紹介します。
初期在庫を設定するには新着!!
version : Visual Components 4.9 初期在庫について シミュレーション開始時に初期在庫を生成したいケースがありますが、「初期在庫」プロパティというような直接的な設定は用意されておりません。疑似 […]
搬送と作業の優先順位について
version : Visual Components 4.9 搬送タスクと作業タスクの優先順位 タスクの優先順位(Priority)とは、リソースがどのタスクを優先して実行するかを決める為のものです。搬送タスクはトラン […]
ワークを複数同時搬送するには
version : Visual Components 4.9 ワークの複数同時搬送 人やAGVなどによる複数同時搬送は状況によって設定が複雑になることが多く、上手くいかないという問い合わせを多くいただきます。今回は複数 […]

AGVが直線的に移動してしまう
version : Visual Components 4.9 意図せずAGVが直線的に目的地へ移動する問題 基本的にAVGはPathwayArea上を移動しますが、以下のエラーが発生するとPathwayAreaを無視し […]

形状のスケールの変更
version : Visual Components 4.9 スケールとは 形状あるいはコンポーネントの大きさの比率のことをスケールと言います。Visual ComponentではTransformフィーチャを使用して […]

ライセンスのディアクティベート回数制限について
ディアクティベート回数制限とは スタンドアロンライセンスにはディアクティベートの回数に制限が設けられています。仮にディアクティベートが無限に可能な場合、別PCへライセンスの移行が無限にできることになりフローティングライセ […]
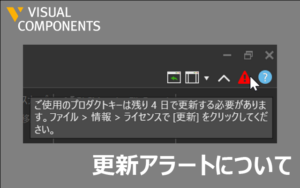
ライセンスの更新アラートについて
version : Visual Components 4.8 更新アラートとは ライセンスの自動更新が行われず更新期限が近付いている場合に、画面の右上に赤色の注意アイコンとメッセージが表示されます。 原因 ライセンスは […]