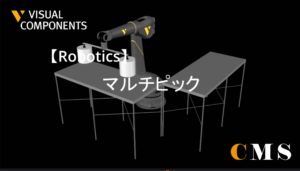
2025年11月25日
本記事では、ロボットプログラムにおけるマルチピックの設定方法を紹介いたします。 version : Visual Components 4.10 概要 ロボットプログラムにおいて複数製品をPickするであっても基本的には […]
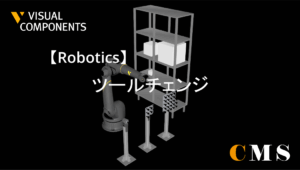
2025年11月4日
本記事では、ロボットプログラムにおけるツールチェンジの設定方法を紹介いたします。 version : Visual Components 4.10 概要 ツールチェンジは、プロセスモデリングの搬送時でも設定可能ですが、ロ […]
2025年10月30日
ロボット教示やプロセスモデリングにおけるシグナル待機型のステートメントでは、「トリガー待機」プロパティの設定がルーティンの構成に大きく影響します。 version : Visual Components 4.10 特徴 […]
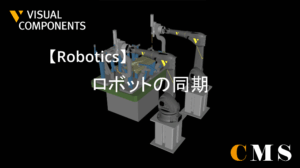
2025年10月10日
version : Visual Components 4.10 概要 ロボットプログラムにおいて複数のロボットが混在するレイアウトでは、ロボット間でタイミングを図ることはたびたび発生することだと思います。タイミングを図 […]
2025年9月22日
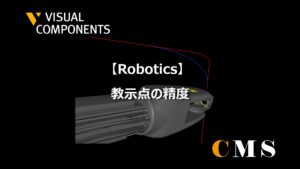
version : Visual Components 4.10 ロボットの各軸補間・直線補間ステートメントでは、目標とする座標への到達精度を設定することができます。 上図ではどちらも直角を描くように教示点が設定されてい […]
2025年9月8日
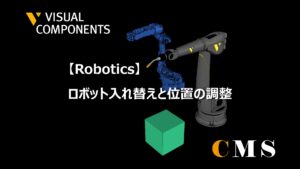
ロボット教示では、教示プログラムの作成後にモデルの入れ替えや座標位置の調整が可能です。 version : Visual Components 4.10 ロボット入れ替え ロボット入れ替えコマンドでは使用中のロボットハン […]
2025年6月11日
ロボット教示でワークのグラブ/リリースの対象がうまく設定できない場合の回避策について紹介します。 version : Visual Components 4.10 ボリュームエリア ロボット教示ではグラブの際に、対象のワ […]